Simultaneous Localization and Mapping (SLAM) based on 3D Gaussian Splats (3DGS) has recently shown promise towards more accurate, dense 3D scene maps. However, existing 3DGS-based methods fail to address the global consistency of the scene via loop closure. To this end, we propose LoopSplat, which takes RGB-D images as input and performs dense mapping with 3DGS submaps and frame-to-model tracking. LoopSplat triggers loop closure online and computes relative loop edge constraints between submaps directly via 3DGS registration, leading to improvements in efficiency and accuracy over traditional global-to-local point cloud registration. It uses a robust pose graph optimization formulation and rigidly aligns the submaps to achieve global consistency. Evaluation on the synthetic Replica and real-world TUM-RGBD, ScanNet, and ScanNet++ datasets demonstrates competitive or superior tracking, mapping, and rendering compared to existing methods for dense RGB-D SLAM.
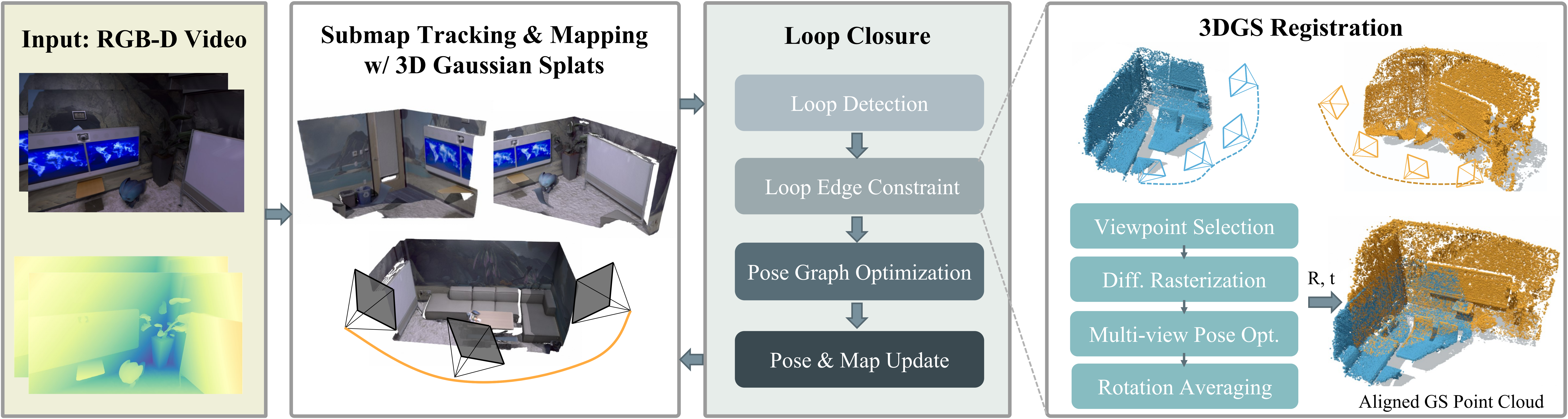
LoopSplat is a coupled RGB-D SLAM system that uses Gaussian splats as a unified scene representation for tracking, mapping, and maintaining global consistency. In the front-end, it continuously estimates the camera position while constructing the scene using Gaussian splats. When the camera traverses beyond a predefined threshold, the current submap is finalized, and a new one is initiated. Concurrently, the back-end loop closure module monitors for location revisits. Upon detecting a loop, the system generates a pose graph, incorporating loop edge constraints derived from our proposed 3DGS registration. Subsequently, pose graph optimization (PGO) is executed to refine both camera poses and submaps, ensuring overall spatial coherence.














@inproceedings{zhu2025_loopsplat,
author={Liyuan Zhu and Yue Li and Erik Sandström and Shengyu Huang and Konrad Schindler and Iro Armeni},
title = {LoopSplat: Loop Closure by Registering 3D Gaussian Splats},
booktitle = {International Conference on 3D Vision (3DV)},
year = {2025},
}